

奥谱天成ATH9010助力农业生产
小麦是我国三大粮食作物(小麦、水稻、玉米)之一,是国家粮食战略安全的关键。然而,作物病虫害(常见病害有20余种)严重危害小麦生产安全。由小麦条锈病菌引起的条锈病爆发性爆发和区域性流行。在流行年份,条锈病可使小麦减产40%以上,甚至绝收。因此,防治小麦条锈病对粮食安全至关重要。只有准确监测小麦病害,才能有效防控,最大限度减少损失。
传统上,农作物病害采用目视监测,存在覆盖范围小、调查人员主观性强等重大局限性。因此,需要一种高效、无损的农作物病害监测方法来取代传统方法。经过多年的发展,遥感已经成为监测农作物病害的有效技术。遥感的优势在于可以低成本评估农作物病害的空间分布,从而更好地控制病害。
高光谱遥感是一种相对先进的技术。与多光谱技术相比,它可以提供丰富的窄带信息。先前的研究已经讨论了高光谱遥感在各种应用中相对于多光谱的优势。高光谱技术在作物病害监测中的优势在于它可以捕捉到由病害引起的某些生理变化(例如色素和水分含量)。在之前的研究中,许多作物病害已经通过高光谱遥感进行了监测,包括小麦黄锈病、白粉病、镰刀菌赤霉病、花生叶斑病、番茄斑萎病毒和水稻细菌性叶枯病。
植被指数(VI)在之前的研究中已显示出良好的作物病害监测性能,VI 对病害引起的叶片内部生理变化很敏感,但不能代表叶片表面特征的变化。纹理是一种反映病害引起的外部变化的特征,已被证明在作物病害监测中具有良好的性能。先前的研究已经结合光谱和纹理特征来提高表征病害的能力。这些研究证实了 VI、纹理特征(TF)及其组合对作物病害监测的有效性。然而,先前关于融合光谱和图像特征检测作物病害的研究大多是在叶片尺度上进行的,该方法在田间尺度上检测病害的可行性尚未得到证实。
无人机遥感技术融合了灵活性高、成本低和操作简便等优势,弥补了传统卫星遥感的不足之处。通过将遥感设备搭载在无人机上,可以快速采集高时空分辨率的空间遥感信息,随后进行数据处理、建模及应用分析。这为农田智能化管理的发展提供了重要的技术支持。
为深入研究这一问题,应用采用搭载高光谱传感器的无人机在不同空间尺度上监测小麦黄锈病的多个感染阶段。研究目标是:(1)评估使用无人机高光谱图像获取的 VI、TF 及其组合在田间尺度上监测小麦黄锈病的性能;(2)确定使用无人机图像监测小麦黄锈病的最佳图像空间分辨率;(3)利用最佳特征和最佳空间分辨率建立田间尺度上感染早期、感染中期和感染晚期的黄锈病监测模型。


图1 正常小麦叶片(左)和黄锈病小麦叶片(右)
2、技术思路与主要内容
2.1. 遥感影像获取与预处理
采用配备高光谱成像传感器的无人机系统(图 2) 采集小麦图像。无人机高光谱成像系统由四部分组成,包括六旋翼电动无人机系统 、高光谱数据采集系统、三轴稳定平台和数据处理系统。

图2无人机传感器
无人机飞行高度为30 m,飞行速度为4 m/s,前向重叠度约80%,侧向重叠度约60%。在30 m的飞行高度下,我们获得了空间分辨率为1.2 cm,光谱分辨率为4 nm的高光谱图像。无人机高光谱数据采集要求天气晴朗,无风或风速较小。本研究中的图像采集时段为上午11:00至下午13:00。
在小麦生长的关键时期,我们于4月25日、5月4日、5月11日、5月18日、5月24日和5月30日进行了6次基于无人机的高光谱观测试验,分别对应接种后7、16、23、30、36和42天(DPI)。图3显示了不同感染时期小麦黄锈病的发展情况。

图3 不同时期小麦的照片
每次共获取24个样品,其中健康地块获取8个样品,两个接种地块获取16个样品。6次试验共获取144个样品,其中健康样品57个,感染黄锈病样品87个。
小麦黄锈病的严重程度用病情指数(DI)来描述。从每个1m2的地块中随机选择40株小麦植株,以所选植株顶端第一片和第二片小麦叶片来评估病情严重程度。每个地块共选取80片叶片计算DI。根据《国家农作物病害调查预报规范》(GB/T 15795-2011),叶片发病率分为9级(0%、1%、10%、20%、30%、45%、60%、80%、100%),其中0%为健康,1%为病害1级,10%为病害2级……100%为病害8级。黄锈病发病率评估在无人机采集图像后立即进行,并由同一人员在专业人员的指导和监督下进行。
2.2. 实验方法
采用PLSR建立小麦黄锈病监测模型。PLSR此前已被应用于作物生长监测和生理化学参数估计。PLSR是一种经典的建模方法,它包括三种方法的特点:PCA、典型相关分析和多元线性回归分析。在PLSR中,变量的潜在结构是通过成分投影来确定的,该成分投影将预测变量和观测变量投影到一个新的空间。因此,通过选择最&优的潜在变量,将具有高数据冗余的原始变量转换为少数变量。PLSR可以表示为描述预测变量和观测变量之间关系的线性模型。
2.3. 高光谱像元获取
最近邻算法对原始图像(1.2 厘米分辨率)进行重新采样,以生成新图像(3、5、7、10、15、20 厘米分辨率)。无人机影像中的地物包括小麦植株和土壤。
2.4. 采样点
本研究采用NDVI阈值法从1.2 cm空间分辨率的图像中提取小麦像素。该方法的过程如下:首先,设定最佳NDVI阈值。一般植被的NDVI范围为0.3–1.0。经过多次尝试,我们发现0.42的NDVI阈值可以准确地将小麦像素与背景像素分开。其次,将大于0.42的NDVI制作成用于提取小麦像素的掩模文件。最后,我们利用该掩模文件对原始图像进行裁剪,得到仅包含小麦像素的图像。为了保证不同空间分辨率图像的小麦像素的一致性,利用原始图像(1.2 cm)的NDVI阈值制作的掩模文件来提取其他空间分辨率图像的小麦像素。仅包含小麦植株像素的高光谱图像用于后续处理和分析选择这些特定分辨率的原因是它们代表了大多数用于监测作物健康状况的无人机图像。图 4 显示了具有不同空间分辨率的无人机高光谱图像的示例,该图像是 4 月 25 日获得的图像中区域 A 的一部分。
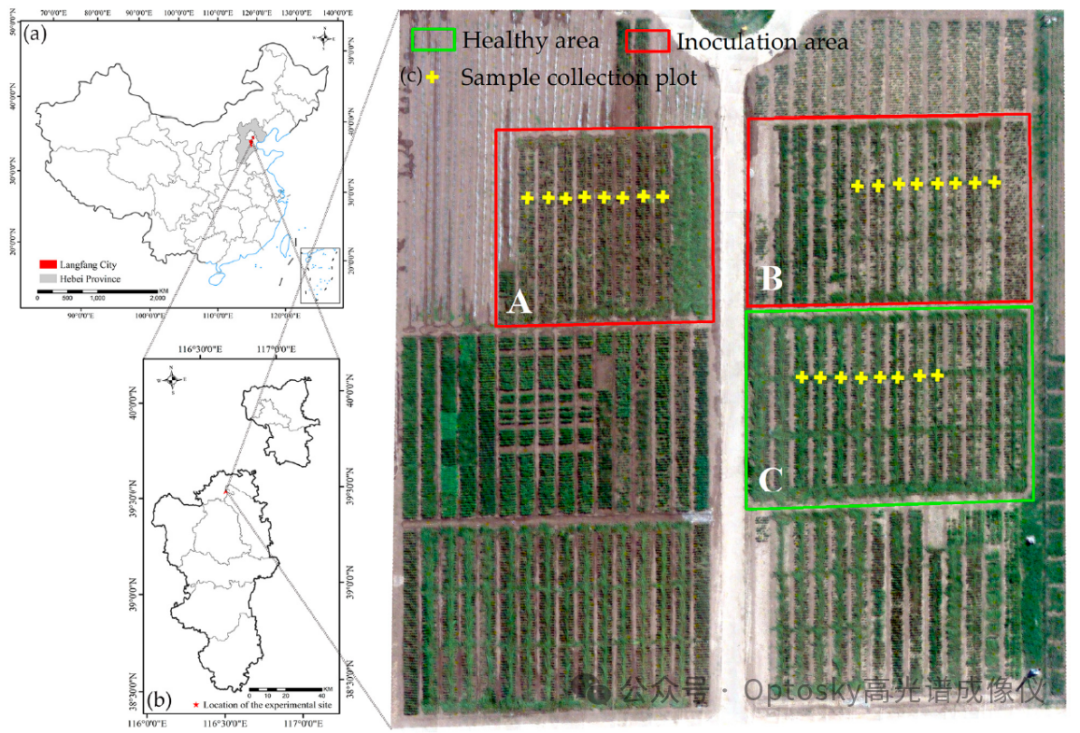
图 4 不同空间分辨率的无人机高光谱图像
3、 结论
本应用利用无人机高光谱影像在田间尺度上对小麦条锈病进行监测,采用不同的特征(VI、TF及其组合)建立小麦条锈病早期、中期和晚期的PLSR监测模型,并评估了不同影像空间分辨率(1.2 cm、3 cm、5 cm、7 cm、10 cm、15 cm和20 cm)对监测精度的影响。得到以下结论:(1)基于VI的模型在侵染中期的监测精度最高,基于TF的模型在侵染晚期的监测精度最高。但基于TF的模型不适用于侵染早期的条锈病监测,最高监测精度仅为R2为0.28。 (2) 在三个侵染时期,基于VI-TF的模型监测精度均高于基于VI和基于TF的模型,且在侵染后期监测精度最高(R2=0.88),此外,基于VI-TF的模型在侵染初期的监测精度也显著提高,适用于病害的早期检测。(3)空间分辨率对基于VI的模型监测精度影响较小,对基于TF的模型影响较大,基于VI-TF的模型监测条锈病的最佳空间分辨率为10cm。

图5 识别结果

